Robust Temporal Point Event Localization through Smoothing and Counting
Abstract
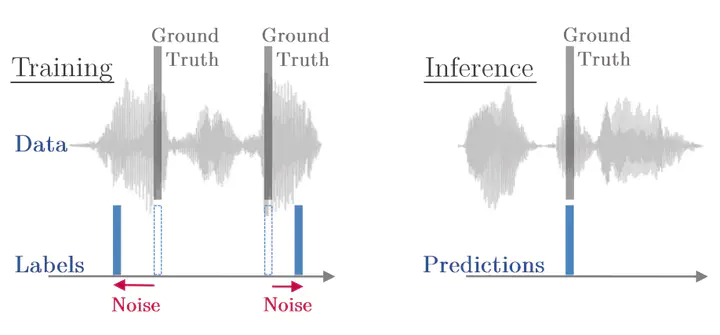
This work addresses the long-standing problem of robustly learning precise temporal point event localization despite only having access to poorly aligned labels for training. To that end, we introduce a novel loss function that relaxes the reliance of the training on the exact position of labels, thus allowing for a softer learning of event localization. We demonstrate state-of-the-art performance against standard benchmarks in challenging experiments.
Type
Publication
In ICML Workshop on Uncertainty & Robustness in Deep Learning